| BOM |
|
Components/Parts:
|
| Equipment:Breadboard, Jumper Wires, Computer w/USB Cable |
Skills
|
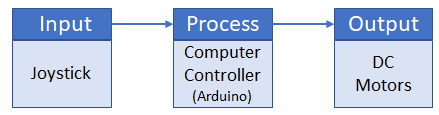
Computerizing the control system is a basic controller task. A microcontroller is a computer designed to control input and output devices. Microcontrollers are used to automate many products and devices we use daily.
The Arduino board is a microcontroller. This board provides pins for input and output with programmable control. Computerizing the control system involves reading the input and making specific motors react to that input. The input device is a joystick for this system, and the output devices are DC motors.
|
|
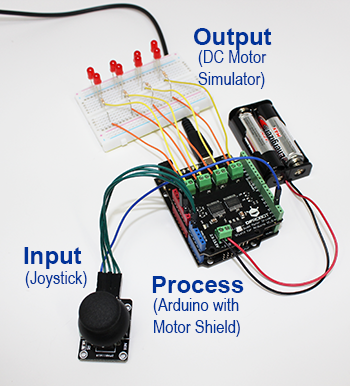
The Arduino board controlling DC motors with the input of a joystick power the SEArover.
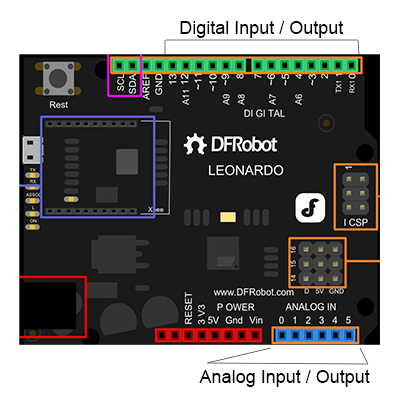
The input and output pins of the Arduino are digital or binary, HIGH or LOW, which electrically is 5v or 0v, respectively. Analog input/output pins are any voltage between 0v and 5v.
As mentioned, a microcontroller is a computer. It can be programmed to read an input device and react by making a change in an output device. For this use, we will be using the input from a joystick to control rover motors. To prepare for Arduino microcontroller, if you have not done so, download and install the Arduino IDE.
Installing the Arduino Desktop IDE: Windows OS , Mac OS
And, this tutorial will give you the basics of coding in this environment.
Copy and Paste Programming: Arduino IDE
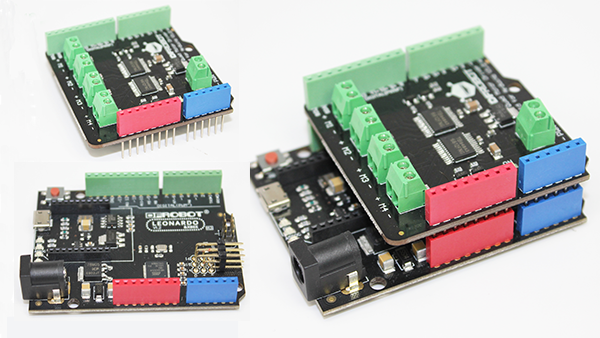
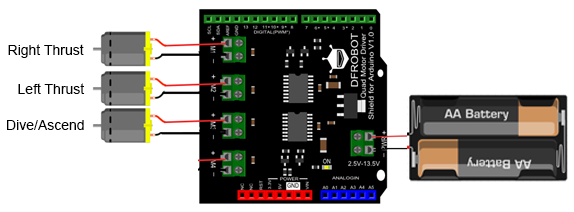
The motor shield provides the electronic circuits to control four DC motors. What can you control on a DC Motor? Rotation, Speed and Direction. That is what the motor shield does.
As you have learned, DC motors change rotation when polarity is flipped. In the previous sections, DPDT switches were used to flip the +/- poles of the battery connection changing motor rotation. Likewise, the motor controller can be programmed to flip polarity to control rotation. A plus, it can also be used to control motor speed.
The shield fits on top of the Arduino board. Line up the pins and insert the Quad Motor Controller.